
Right-Angle Gearmotors
from ElectroCraft

ElectroCraft is a world-renowned leader in the design and manufacturing of right-angle gearmotors. Known for their smooth, controlled power delivery with high starting torque, our gearmotors deliver excellent performance for a wide range of applications, from powered wheelchairs and lifts used for medical mobility to mobile robots and guided vehicles used in warehouses and factories. Available in a wide range of motor and gearing options, from configurable to fully customizable, we have a solution to satisfy your specific application requirements.
MP Mobility Gearmotors
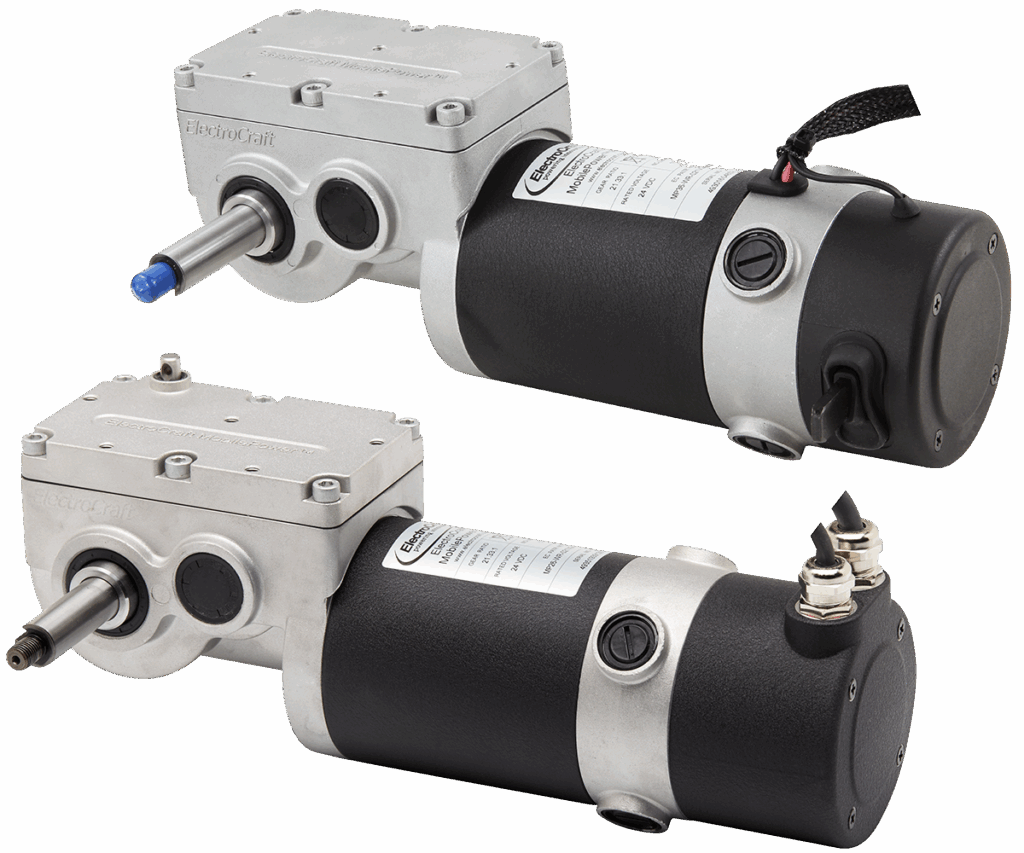
ElectroCraft MobilePower™ (MP Series) gearmotors feature an integrated design that provides superior performance and reliability at an affordable price compared to traditional right-angle motor/gearbox combinations. The MP Series is available in three distinct configurations:
- 4-pole PMDC brush motor with integrated 2-stage worm/spur gearbox and brake unit, designed specifically for medical mobility applications
- 4-pole PMDC brush motor with integrated 2-stage worm/spur gearbox, brake unit, optical encoder, and industrial grade cabling for a wide range of applications
- 4-pole Brushless DC motor with integrated 2-stage worm/spur gearbox, brake, encoder, and industrial grade cabling, for a wide range of applications, offering higher efficiency, reduced noise, and longer life
MP24 91.5 mm Mobility Gearmotors
MP26 93.1 mm Mobility Gearmotors
MP36 93.1 mm Mobility Gearmotors
MPP Mobility Gearmotors
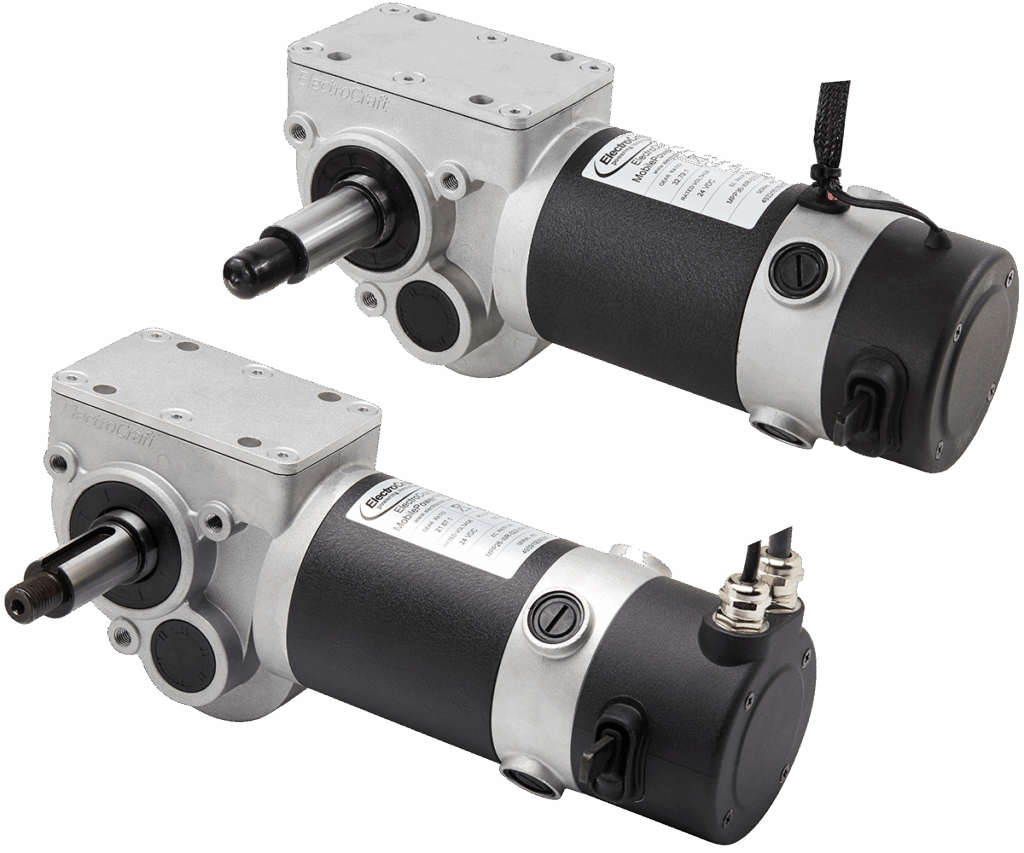
ElectroCraft MobilePower™ Plus (MPP Series) gearmotors feature a heavy-duty integrated design that provides superior performance and reliability at an affordable price compared to traditional right-angle motor/gearbox combinations. The MPP Series is available in three distinct configurations:
- 4-pole PMDC brush motor with heavy-duty integrated 2-stage worm/spur gearbox and brake unit, designed specifically for medical mobility applications
- 4-pole PMDC brush motor with heavy-duty integrated 2-stage worm/spur gearbox, brake unit, optical encoder, and industrial grade cabling for a wide range of applications
- 4-pole Brushless DC motor with heavy-duty integrated 2-stage worm/spur gearbox, brake, encoder, and industrial grade cabling, for a wide range of applications, offering higher efficiency, reduced noise, and longer life
MPP24 91.5 mm Mobility Gearmotors
MPP26 93.1 mm Mobility Gearmotors
MPP36 93.1 mm Mobility Gearmotors
MPS Mobility Gearmotors

ElectroCraft MobilePower™ (MPS Series) gearmotors feature an integrated single-stage gearbox design that provides superior performance and reliability at an affordable price compared to traditional right-angle motor/gearbox combinations. The MPS Series is available in the following configuration:
|
